全面了解GPS全球定位系统
来源:百度文库 编辑:神马文学网 时间:2024/04/28 13:31:53
全面了解GPS全球定位系统(2)
8. DGPS(Differential GPS)
DGPS(Differential GPS)就是差分GPS定位法,其原理是:应用已知参考点的坐标,最大程度减少误差。通过在参考点安装GPS接收机,观测卫星并求得各卫星的伪距纠正值,再利用此值改善移动站用GPS接收器的定位误差。
(1) GPS原理
① 基站GPS(Reference station)
通过安装在基站的GPS计算出基于卫星测量的位置数据与基站位置数据之差,再把生成的位置纠正数据发送到移动站GPS。
② 移动站GPS(Mobile station)
综合基于卫星测量的位置数据与基站发送的位置纠正数据后,确定准确的位置。
(2) DGPS特点
① DGPS与目前光学设备相比,所受的视通与距离限制较少。
② 不受气象条件及夜间观测的影响
③ 可以1个人进行测量
④ 无需记录手册,仅通过计算机就可以自动处理。
(3) DGPS种类
① DGPS
? 仅仅通过处理卫星信号中的C/A码,定位准确度就可以达到1m左右
? 通常如果能接收4个以上的卫星信号就可以测量。但从code处理方式上看:计算速度虽然较快,但准确度却降低了。
? 一般适用于允许存在一定误差范围的海洋上的位置测量或汽车导航等领域。
② RTK(Realtime Kinematic)
? 通过处理卫星信号中的L1、L2的载波,定位准确度可达到1~2cm左右
?一般需要接收5个以上的卫星信号才能测量,采用载波处理方式。虽然计算过程比较复杂,但准确度非常高。
?一般适用于需要准确度较高的陆地测量、海上测量及移动位置测量。
(4) DGPS定位方式
① 实时定位
?通过有线与无线,把基站GPS生成的位置纠正数据传送至移动站GPS,实时解算出正确位置。
?位置纠正数据的通信方式
- 无线通信:使用UHF, VHF, HF, MF等无线通信,主要应用于一般测量
- 有线通信:使用基于光纤线缆的通信,主要应用于测量领域
② 后处理定位
? 基站及移动站GPS各自获得卫星数据后,通过应用软件解算位置
? 因为实时定位方法或Kinematic定位方法的存在,目前已经很少使用它了
(5) DGPS定位存在的问题及对策
① 位置纠正数据通信存在的问题
? 问题
DGPS测量的成败受通信设备的性能影响,较难实现长距离测量
? 对策
- 在通信设备性能范围内设置多个基站;
- 向目前运营中的GPS观测站提供位置更正数据传送服务(LADGPS或WADGPS系统组建)
② 坐标转换体系存在的问题
? 问题
在 WGS84坐标系转换为TM坐标系时,用户随意使用各自的转换系数
? 对策
规定并发布国家级分地区坐标转换系数,以获得统一准确度的测量结果
9. IDGPS(Inverse DGPS 或 Inverted DGPS)
DGPS是用于确定移动站GPS位置并以用户为主的定位方法。与此相反,IDGPS是用于确定移动站GPS位置直至测定位置变化量,是一个以管理员为主的定位方法。与DGPS从基站向移动站GPS传送纠正信号方式相反的是,IDGPS是通过从移动站GPS向基准站GPS传送观测数据,测得准确的移动站GPS位置的逆DGPS方式。
(1) IDGPS原理

(2) DGPS与IDGPS的比较
DGPS
Inverted DGPS
通信方向
基站至用户
用户至基站
纠正方
用户
控制站
纠正领域
伪距领域
伪距或导航领域
服务对象
多数
特定少数
误差范围
m~cm
m~cm
应用领域
CNS、海洋测量、土木工程测量等
车辆关系、移位测量
(3) 特点
① 在DGPS定位方式中,各移动站只接收基站GPS的位置纠正信息,所以通信方式比较简单。但在IDGPS方式中,基站GPS需要同时接收多个移动站传送的位置数据,所以对通信设施的要求比较高。
② 需要实时的并同时对多个移动站GPS数据进行位置纠正的软件。
③ 应用于车辆关系、ITS及建筑物位置移位测量等。
10. SA/AS(Selective Availability/Anti-Spoofing)
美国国防部出于政策等原因,采取了人为降低GPS测量准确度的措施。也就是赋予卫星时钟信息及轨道信息等随机误差,或随机改变发送方式与信号形态,这种人为降低GPS准确度的方式称之为SA。出于军事目的,把P码进行加密,称之为AS。
(1) SA(Selective availability)
① 通过调节星历表资料与卫星时钟资料使卫星与接收机之间产生误差
② SA工作状态下的误差约为100m左右
③ 通过相对位置解算或DGPS,降低由SA造成的误差
(2) 解除SA
自从2000年5月1日,解除了对GPS误差具有最大影响的SA。所以,目前可以在任何时间、地点都能够获得精确度为5~15m范围内的位置信息。此项措施令航空、交通、物流、船舶等多种民间应用领域受益非浅。但是即使解除了SA,但以米单位为精确度的汽车导航及GIS领域仍需要目前的DGPS技术。
(3) AS(Anti Spoofing)
① 为了防止敌人的干扰,这是把用于军事目的Pcode进行密码化的方法
② 只有具备解密功能的接收机才能接收信号
11. GPS的 Cycle Slip
Cycle Slip是GPS载波相位追踪环路(Phase lock loop:PLL)上瞬间丢失载波相位差值而产生的误差,Sycle Slipe对使用载波相位数据的精密位置测量领域会造成重大影响,所以检验Cycle Slip非常重要。
(1) 产生Cycle Slip的原因
① GPS天线或周围的地形、建筑物等引起的信号中断
② 高信号噪声
③ 低信号强度(Signal strength)
④ 低卫星高度角
⑤ Cycle Slip一般多树发生在移动测量过程中
(2) 对付Cycle Slip的方法
① 根据接收线路的特性,跳跃波长整数倍的特性
② 可以在数据的开始处理阶段发现Cycle Slip,并编辑
③ 通过基线解算软件进行自动处理
12. DOP(Dilution Of Precision) 相对误差
如同后方交会法中参考点排列会影响准确度一样,GPS误差也受接收机与卫星的几何排列影响。此时,作为定位准确度影响的系数,使用DOP(精密度低下率)。
(1) DOP种类
① GDOP : 几何(三维座标与时间)精密度
GDOP²=PDOP ²+TDOP ²
② PDOP : 位置精密度(三维位置):3~5程度适当
PDOP ²=HDOP ²+VDOP ²
③ HDOP : 水平精密度(水平位置): 2.5以下适当
HTDOP ² =HDOP ²+TDOP ²
④ VDOP : 垂直精密度(高度)
⑤ RDOP : 相对精密度
⑥ TDOP : 时间精密度
(2) DOP的特点
① 数值越小表明精度确越高
② 把地表面上最佳排列状态作为“1”
③ 到“5”虽然 在使用上没有问题,但超过“10”时,受影响较大
④ 接收机处于中间,四个卫星呈正四方形,即体积最大时,GDOP、PDOP等最小

(3) 可视性(Visibility)
即便是良好的GDOP,也可能由于山、建筑物等遮挡,不能确保卫星传播路径的可视性(Bad visibility)。这种与卫星的视通有关的问题称之为可视性。
13. RINEX
RINEX是Receiver Independent Exchange Format的缩写,是GPS数据格式的国际标准。通过采用这种统一的国际标准,在静态定位中使用多种GPS接收机观测时,即使使用任何一种后处理软件,也可以使收集到的GPS数据基线解算变得容易。
(1) 通过不同GPS接收机观测时的注意事项
① 允许共同使用不同生产时间、不同种类的GPS接收机
② 需要统一的卫星信号接收性能(混合使用2个波形及1个波形接收机时,参考1个波形性能的结果)
⑦ 如果GPS天线高度不同结果就不一样,所以观测时必须正确输入天线接收卫星信号的中心点高度
(2) RINEX格式的组成
① 数据格式: ASCII(American Standard Code for Information Interchange)形式
?ASCII :为了处理资料及计算机相关的设备之间的通信,指定了国际标准码。ASCII字节由7bit字节与用于检验奇偶的1bit字节构成。
② 文件组成
?观测文件 : 包括Pseudo range 及 Carrier phase
?轨道星历文件:卫星轨道信息等
?气象文件:气象信息等
(3) 后处理软件与RINEX格式
① 用于静态定位计算的后处理软件,随着不同GPS接收机及生产商,其形式及运用方法都有所不同。
②一旦生产商的GPS数据形式已经处理好,就非常容易转换为RINE形式。
14. 应用于测量的卫星系统
用于测量的卫星大致可分为测地卫星与地球观测卫星,测地卫星有GPS或GLONASS,主要应用于测量;而地球观测卫星有LANDSAT或SPOT,主要应用于获得基于远程探测的卫星图片。
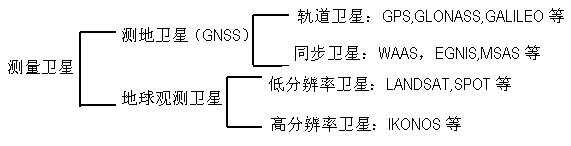
测地卫星有:GPS(美国)、GLONASS(俄罗斯)及计划发射的GALILEAO(欧盟联合)等轨道卫星与分布各大陆的固定的WAAS(美洲大陆)、EGNOS(欧洲大陆)、及计划发射的MSAS(亚洲大陆)等同步卫星。也把这些卫星统称为GNSS(Global Navigation Satellite System)。
① 轨道卫星
?种类 : GPS, GLONASS(Global Navigation Satellote System)及计划发射的GALILEO 卫星
?GPS, GLONASS :用于军事目的的测地卫星,根据美国国防部的政策,有可能随时人为降低准确度,或中断使用
?GALILEO :以民间为主导的导航系统,针对GPS或GLONASS,专用于民用卫星导航系统
② 同步卫星(区域性卫星:Geostationary Satellite)
?种类
- WAAS(Wide Area Augmentation System : 美洲大陆)
- EGNOS(European Geostationary Navigation Overlay System : 欧洲大陆)
- MSAS(MTSAT Satellite Augmentation System : 亚洲大陆)
?目前WASS与EGNOS已经投入使用,MSAS由日本计划发射
?GPS及GLONASS相结合使用,通过向地面传送位置信息数据,实现广域DGPS服务功能,所以仅一台接收器也可以获得1~3m以内的准确位置的定位。
?今后将广泛应用于CNS(Car Navigation System), ITS(Intelligent Transportation System), LBS(Location Based Service)领域,所以有望获得飞速发展。
15. GALILEO卫星系统
GALILEO是欧盟计划并实施的卫星导航系统,与GPS或GLONASS不同,是专门应用于民用的系统,它也是GNSS项目的一部分,计划于2008年正式投入使用。
(1) GNSS项目
GNSS项目分为2个阶段,GNSS-1GPS及GLONASS相关的区域性卫星运营阶段,GNSS-2是GPS与GLONASS独立卫星运营阶段。
类别
卫星名称
运营目的
运营地区
GNSS-1
WAAS,EGNOS,MSAS
结合当前的GPS,GLONASS,提供广域DGPS功能服务,定位准确度非常高(1~3m)
WASS(美洲大陆):运营中
EGNIS(欧洲大陆):运营中
MSAS(亚洲大陆):推进中
GNSS-2
GALILEO
运营与GPS及GLONASS相同的独立的民用卫星导航系统
全球范围内(2008年)
(2) GALILEO 卫星
① 特点
? 计划使用3个频率的载波
? 有望获得比GPS或GLONASS更高的独立定位准确度(2drms至4m以下)
? 载波定位Ambiguity瞬间确定的可能
② 卫星轨道
? 卫星高度:以地面为起点高度为23.61km
? 公转周期:14小时21分6秒
? 卫星数量:30个中轨道卫星
? 轨道平面:3个轨道排列10个卫星
? 轨道平面角度:54?
? 时间测量:UTC
③ 提供服务
? 免费信号使用服务:OSA(开放服务)
? 收费信号使用服务:CAS(管制服务)
- CAS 1 : 商业性服务
- CAS 2 - SAS : 高精密服务
CAS2 - GAS : 用于非民用领域的政府服务(使用密码的信号)
全面了解GPS全球定位系统(3)
16. GPS与GLONASS比较
GLONASS是与美国GPS具有相同概念的测地卫星系统,可以应用于定位。但由于俄罗斯财政出现困难,所以减少了卫星数量,目前只有6~7个卫星在工作。所以GLONASS很难独自工作,但是结合GPS,可以大大改善DOP。
参数
GLONASS
NAVSTAR GPS
运营体系的全部卫星数量
21+3(预备)
2000年 当前6个
24+3(预备)
2000年 当前27个
轨道平面数量
3
6
轨道倾斜度
64.8°
55°
卫星轨道的高度
19,100 km
20,180 km
轨道周期
11小时15分
12小时
地面反复轨道
每恒星日
每8恒星日
卫星(位置推算)的资料传送
9个参数
EC(earth-centered)
EF(earth-fixed)
Certesian坐标系上的位置、速度、加速度
Keplerian参数
Interpolation系数
测地坐标系
SGS85
WGS84
时间基准
GLONASS体系时间
GPS体系时间
体系的时间纠正
UTC(SU)
UTC(USNO)
传送时间
2.5分钟
12.5分钟
卫星信号领域
频率领域
code领域
L1波段频率
1.602~1.615MHz
1.575MHz
L2波段频率
1.246~1.256MHz
1.227MHz
code
所有卫星都统一用C/A-code on L1
P-code on L1, L2
各个卫星不同 C/A-code on L1
P-code on L1,L2
code形态
PRN sequence
Gold code
code频率
C/A-code 0.511MHz
P-code 5.11MHz
C/A-code 1.023MHz
P-code 10.23MHz
时间资料
Clock offset
Frequency offset
Clock offset frequency
Offset and rate
17. GPS的历史与未来
除了俄罗斯GLONASS,GPS一直主导着卫星定位系统(SBPS: Satellite-based Positioning System)市场。但是随着欧盟实施伽利略卫星计划,形成了新的竞争体系,所以民用GPS服务有望迅速提高。
(1) GPS 卫星现状
① 1978年 2月 : 发射Block I 卫星(截止85年发射11个)
② 1989年 2月 : 发射 Block II 卫星(截止90年发射9个)
③ 1990年 11月 : 发射Block IIA 卫星(截止97年发射19个)
④ 1997年 7月 : 发射Block IIR 卫星(目前为止发射6个)
⑤ 2002年 现在 : 29个卫星运行中
(2) GPS 测量的历史
① 1983年 9月 : 宣布民间无偿使用GPS 信号
② 1990年 3月 : SA 启动
③ 1993年 12月 : 24个GPS卫星及实现正常工作
④ 1994年 10月 : 协商今后10年无偿提供GPS服务
⑤ 1995年 4月 : 开始正常工作(24个卫星群正常运行)
⑥ 2000年 5月 : 停止SA工作
(3) GPS未来发展
① 当前L2信号的更新
?如同L1、L2也调制新的民用信号(C/A码),通过2个频率纠正,可以提高定位准确度。
?通过当前的C/A码与P码,以及精密导航软件,提高定位准确度。
?通过支援独立的军用信号(M码),强化安全及提高定位准确度。
② 提供新的L5波频
?在L1及L2波后,提供第三个民用信号L5
?继当前Block IIR卫星群之后,通过Block IIF(Follow)卫星6,提供L5传输服务。
?提供P code水平定位准确度。
?通过实时提供跟踪RTK定位载波信号解决Ambiguity。
?2005年开始实施。
③ 为了在欧盟GALILEO卫星与俄罗斯GLONASS-M卫星系统的竞争中,令GPS持续占据优势并在卫星定位市场不断创造附加价值,预计GPS将提供更好的信号服务。
18. WADGPS
通过VHF或MF传送地面基站生成的位置纠正信号,实现中长距离DGPS功能。而WADGPS(Wide Area DGPS)不在地面设有基站,而是利用通信卫星,通过多个基站网络才发送生成的位置纠正信号。通过这种方式,至少在一个国家内的任何地方,仅用一个GPS接收机,定位准确度就可以达到1m以内。
(1) WADGPS运营体系

(2) 位置纠正数据的形成及发送
① 位置纠正数据的形成
?决定GPS轨道:将伪距及载波测量值处理为Kalman filter后计算。
?电离层延迟纠正:广泛应用Global lonosphere Map S/W。
?大气层延迟纠正
② 位置纠正数据的发送
?以(message)发送加密信号
?通过专用接收机,转换为RTCM标准格式,可以实时实现DGPS
?与应用L1波C/A码的接收机互换
(3) 根据定位范围的DGPS种类
① 个人用DGPS:主要通过UHF无线调制解调器发送位置纠正信号。基站与移动站之间可以定位的距离通常是30Km(近距离)
② LADGPS:主要使用MF(中波)无线调制解调器发送位置纠正信号,基站与移动站之间可以定位的距离为约100km ~ 150km(中距离)左右。
③ WADGPS:因为是利用通信卫星发送位置信号,所以无需组建地面基站。至少在一个国家范围内定位距离是不受限制的(远距离)
19. 韩国公共卫星导航服务介绍(LADGPS)
在韩国,运用最有效的卫星导航服务是基于海洋水产部Beacon DGPS基站的位置纠正服务系统,其内容如下。
(1) Beacon DGPS
① Beacon指的是为船舶或飞机指引路线而设置的固定的符号、标识、光源或与此相关的建筑物。
②Beacon DGPS是通过接收海洋水产部的DGPS基准站(Beacon 基站)发送的位置纠正信号(Beacon信号),仅用一台GPS接收器也可以获得准确度为1~3m的位置信息的实时DGSP定位方法。
(2) 韩国Beacon基站设置现状
① 全国设有11个基站
② 定位范围:以基站为中心,半径在100km~180km之间
③ 定位准确度:约1~3m

(3) 位置纠正数据
① 位置信号纠正的方式采用国际标准形式RTCM(Radio Technical Commission for Maritime Service)SC-104。
② 应用于广播的电波是中波(FM),频率为280KHz~319KHz,24小时广播。
(4) 优缺点
① 基于LADGPS(Local Area DGPA)并可在全国的海上及海岸内实现DGPS定位。
② 基站在约100km范围以内的陆地上,若接收信号良好就可以定位。
③ 使用频率为中波,深受工业噪声(Industrial Noise)影响,所以地区位置纠正信号的接收效果不太好时,使用受限。
20. GPS参考网/GPS观测站
目前GPS参考网(Reference Network)由全球范围内正运营的400个左右的GPS参考点组成,正在计划增设1400个左右的GPS参考站。
GPS参考网广泛应用于导航、测地测量、地形空间信息体系(Geo-Spatial Infomation System:GSIS)等多种领域,所以其应用将急速扩大。从全球范围来看,虽然当前广域参考网的参考点数量只有75个,但未来将扩大到125个。另外,世界各国也在自己的领土建设一定密度GPS观测站,所以可以在全国任何地方不受时间、距离、场所、气象等条件限制,及时地提供正确的位置信息。
(1) 韩国国内GPS观测站建设现状
① 国家地理院、行政自治部、海洋水产部及科学技术部等国家机关建设60个以上的观测站并正常运营中。
② 其它政府投资机关建设独自的GPS参考网并正在运营。
(2) GPS观测系统的组成
① 无人远程观测站
? GPS接收机及天线
? 天线安装塔
? 通信设施
? 电力供应设备
② GPS观测中心
? GPS观测网的控制及管理系统
? 数据的接收、存储、处理及分析系统
(3) 观测网系统的效果
? 提供GPS卫星轨道信息
? 测量时起电子参考点的作用
? 起到车辆导航系统及智能型交通管制系统的基站作用
? 通过测量观测站的位置变动了解地壳变动。还可及时监测地震状况,起到灾难防止系统的作用
21. Airborne GPS
Airborne GPS通过安装在飞机上的GPS接收机实时提供位置信息,这种应用将不断扩大。Airborne GPS根据应用区分为:测量(Surveying)及地图制作(Mapping)及传输(Transportation)。
(1) 测量及地图制作
在测量及地图制作方面,Airborne GPS主要提供传感器的导航与位置资料。
① 航空摄影测量
通过在航空摄影测量仪上安装GPS接收机拍摄照片的同时,直接获得拍摄地点的位置信息(摄影的外部标定要素),这样可以减少航空三角测量所必要的地面基点的数量,也减少了制作地形图所消耗的时间和经费。
② Laser截面测量
? Laser截面测量需要在飞机上安装激光脉冲、GPS接收器及惯性测量设备
? 平面位置确定是依据DGPS确定;垂直距离则通过惯性测量设备确定
? 通过GPS若能确保0.5~1m垂直准确度与数米范围内内的水平准确度,即可制作数字地图
③ 重力及重心倾斜测量
GPS测量可以满足重力及重心倾斜测量所需的位置准确度,在纠正相对速度对重力影响时提供必要的传感器速度资料。
④ Laser的垂心测量、利用雷达影像的3维定位
(2) 运输领域
GPS除在飞机独立飞行中发挥重要作用外,还有其它应用领域。如用飞机洒农药、播种子时,为飞机提供导航。
① 为飞机导航或引导飞机起飞与着陆
② 在山林地区飞机洒农药、播种种子等
22. GPS-VAN
近来,道路设施的计划、管理及维护等持久道路信息实现了资料数据库化(DB)。因此对高效的3维自动化的道路信息管理体系的需求剧增。GPS-VAN正是顺应这样的趋势,通过在车辆上安装GPS接收器、惯性导航体系、CCD照相机及各种探测装置,使高速行使的车辆自动获得与道路相关的各种建筑物的现状与属性信息,这就是可移动式道路系统。
(1) GPS-VAN的设备构成与原理
GPS-VAN由GPS接收机、数码相机、惯性导航设备、轮胎检测器、微动气压仪(statoscope)等组成。
① GPS 接收机
为确定车辆位置一般在车辆上安装GPS接收机。而为了更好地应用DGPS,要有地面GPS参考站。
② 两台数码摄像机
通过摄像机获得立体影像,在计算机上使用数码摄影测量的image registration,实时获得对象的3维位置信息(道路的几何信息)与属性信息。
③ 惯性导航设备、微动气压仪(statoscope)、轮胎检测仪
克服卫星信号盲区存在的问题,决定方向角度。
(2) GPS-VAN的资料获得与处理
① 决定车辆位置
a. GPS技术
?RTK(cm级准确度)
- 确定基于OTF(On-The-Fly)的不确定常数
- 在数分钟的时间内连续观测5个以上卫星
?DGPS(m级准确度)
- 不需要连续接收信号,只在每个观测时间内接收最少4个以上的卫星信号
- 准确度低
b. 解决信号盲区的问题
利用惯性测量仪、轮胎探测仪和微动气压仪
c. 处理获得的资料
通过基于Kalman filter原理的最小平方法处理。
② 立体影像处理
把两台数码摄像机获得的影像,通过数字摄影测量的图像配准(Image registration)处理法处理,实时获得对象的3维位置信息。
(3) GPS-VAN System特点
① 与光波测量相比作业时间更短,只有1名作业人员也可以测量。
② 安装了GPS接收器的车辆可以移动,可任意选定现场内的观测点。
③ 计算机可及时处理获得的资料,资料保存非常方便。
④ 车辆行使过程中,由于天线可以自动保持水平,所以在凹凸不平的地区也可以获得高准确度的资料。
(4) GPS-VAN中的应用
① 建设道路信息体系
② 设施维护管理
③ 施工等各种测量
④ 自动制作地图及获得GSIS资料
⑤ 实现智能交通运输体系(ITS)

全面了解GPS全球定位系统(4)
23. GPS摄影测量学
在目前摄影测量方法基础上,融合了GPS测量技术的新学科。广泛应用于制作地形图的GPS航空摄影测量与GPS-VAN上的地面摄影测量等。
(1) GPS航空摄影测量(Aire borne GPS)
① 基本原理
在航空摄影测量仪上安装GPS接收机,拍摄照片的同时,直接获得摄影机的位置信息。
② 优点
? 通过保持准确的飞行路线实现精密摄影,便利的实现计划。
? 飞行器上的GPS接收机可以准确定位突出位置,所以可以减少航空三角测量所必需的地面参考点数量,相对减少制作地形图所需的时间与经费。
(2) GPS-VAN
① 意义
通过在车辆上安装GPS接收器、数码照相机、惯性导航设备、探测器、微动气压仪等,令行使中的车辆实时自动获取道路信息,这样的系统就叫移动式道路信息系统。
② 特点
?融合了GPS测量技术、车辆导航、数码影像处理技术等最新测量技术。
?提高了获得道路相关GSIS资料的效率。
(3) 引入惯性导航体系(INS)
① GPS摄影测量为了弥补GPS缺点,采用了与INS相结合的方式。
② INS在确定旋转角等方面更加出色。
③ GPS/INS测量体系有望获得普及。
24. CNS(Car Navigation System)
自从GPS应用到测量领域以来,广泛应用于测量为主的多个领域。其中最为显著的是车辆导航系统(CNS)。车辆导航系统通过在车辆上安装GPS,获得GPS位置、时间信息,为行使的车辆提供位置、行进方向、目的地查询、车辆最佳路线及各种便利信息,营造舒适的驾驶环境。
1)CNS的特点
当前CNS使用GPS、DR(推算方法、Dead-Reckoning),还有MM(Map-Matching)等混合计算方法,并传输彩色的CD-ROM存储的数字地图画面,特点如下。
①GPS测量时,获得的资料有GPS接收机的位置(X、Y、Z)及时间信息、卫星轨道信息、接收状态(DOP)等。
② 为行使的车辆做动态测量时,可忽视位置误差的影响,故应用GPS测量方法。
③ 通过从GPS获得的位置信息与时间信息分析车辆的速度,可以间接地分析出道路状态,所以也可以应用于调查交通量。
④ 利用位置信息确定车辆位置;通过存储测量位置信息分析车辆行使路径。
2)CNS系统

25. ITS(Intelligent Transport System)
为了提高交通系统的效率与安全,下一代交通系统将融合GPS、电子、计算机、信息、通信、控制等智能技术,并应用交通管理、信息提供、大众交通、货物车辆的运营与车辆生产等涉及整个交通领域的新技术。可以说,下一代交通系统将是整个交通系统的新型产业,充分体现出21世纪信息化的迅速、安全与快捷模式。
ITS的目标如下:
ITS的目标就是极大地扩大当前交通设施的容量,并通过完善安全系统,不断减少交通事故。
① 通过提高交通系统的运营效率及增加容量,缓解当前交通繁忙现状。
② 通过改善交通服务,提高驾驶员的移动性、便利性及安全性。
③ 提高交通系统的安全性。
④ 强化国家产业竞争力。
⑤ 通过提高能源效率,以及减少大气污染,减少环境治理费用。
⑥ 发展汽车及ITS相关产业。
26. VRS
VRS(Virtual Reference Station)方式是采用‘虚拟参考点方式’的新的实时GPS测量法。此方式无需另建参考站GPS,仅通过移动站GPS,把VRS服务中心提供的位置纠正数据发送至移动电话,便可实现RTK或DGPS测量。
(1) VRS方式原理
①VRS服务中心24小时接收GPS观测数据,并接收安装在模拟参考点的移动站接收的GPS观测数据。
②利用观测站与模拟参考点的观测数据,通过静态定位方式瞬间处理,生成模拟参考点的位置纠正数据,并通过移动电话或无线互联网调制解调器发送给移动站GPS用户。

(2) VRS 的定位条件
① 应具备完善的国家级测地参考点体系。
② 观测站应至少以30~50km间距均匀排布。
③ 应不断提高瞬间生成位置纠正数据的GPS基线解算及调整技术。
④ 提供的位置纠正数据应具有测地结果的权威性。
⑤ 应确保作为位置纠正数据的通信媒体的移动电话或互联网调制解调器等通信质量。
⑤ 移动站GPS用户需要掌握GPS测量基础知识
(3) VRS定位的优点
① 可以解决RTK或DGPS定位存在的许多问题。
?无需另建参考点GPS
?无需接收、发送位置纠正数据所需的无线调制解调器设备
?因使用移动电话,所以不受通信距离的制约
?无需实时测量所需设备的初始化状态
② 提供多种GPS定位服务
?精密定位:cm级的RTK-VRS服务;
?一般定位:Sub meter 级DGPS-VRS;
?静态定位:后处理方式的静态测量VRS服务
③ 通过静态VRS方式时,在参考点无需另外安装GPS接收机,而是把观测站间的基线直接应用于session观测。所以可以用较少的GPS设备观测到更多的结果。
(4) VRS定位的缺点
① 在基于GPS观测网的VRS网以外的地区就不能定位;
② 定位范围为移动电话可接听范围;
③ 存在移动电话收费的问题;
④ 需要构筑整体VRS系统所需的巨大的建设费用,包括:建设观测站、组建VRS服务中心、扩充移动电话基站网及提高通话质量等;
⑤ 这些工作的前提是要对地理、经济等因素作出可行性评价
27. LBS
移动位置服务(LBS—Location Based Service)是利用一定的技术手段,通过移动通信网不仅可获得终端用户的准确位置(经纬度坐标),还可在电子地图平台的支持下为用户提供相应的增值服务。它可以实现紧急救助、个人位置信息服务与ITS相关服务等功能。这些应用当中,基于电子地图获得位置信息与跟踪是最重要的应用领域。
(1) LBS的功能及期待效果
① 紧急救助援助服务
?救灾时提供位置信息;
?车辆事故、防盗、应急救助、预防犯罪等领域;
?通过连接119、110,实现自动控制功能
② 位置信息服务
为营业、观光、物流、配送、安全等多种产业领域提供用户当前位置与各种相关服务
③ 交通信息服务
?提供实时交通信息及汽车导航功能;
?提供最短路径及最佳路径;
?可实现物流管理
(2) LBS的运营体系
LBS由移动通信基站网、个人移动终端机与LBS运营中心的无线通信体系组成。

(3) LBS的定位方法
① 利用当前移动通信用基站网络
?AOA(Angle of arrival)方式
由两个以上基站测量接收终端机信号的方向并算出方位角,再确定终端机位置。

?TOA 方式(Time of Arrival)

从3个以上的基站测量终端机信号到达的时间,再得出距离确定终端机位置。
② 利用GPS的方法
? 在终端机上安装GPS,直接确定位置
? 通过基站将测定的位置信息直接传送到运营中心

(4) 为组建LBS系统的测量条件
① 应用当前移动通信基站网
? 对各个基站根据国家级三角点测量方法进行绝对坐标测量
? 确保基站相互间的视准线
? 城市建筑物会产生反射信号,这种信号令终端机产生误差,所以需要开发解决此类问题的技术
② 利用GPS
? 个人便携式终端机上需要安装GPS
? 需要传送GPS确定的用户位置信息与LBS运营中心处理的服务数据向移动用户双方向通信
③ 发展应用于上述用途的多种图层电子地图
? 发展可以标识用户位置、跟踪的电子地图
? 发展符合用户要求的多种不同图层的电子地图
? 使用当前坐标系时,需要建立可以迅速提供服务的实时坐标转换系统
? 不转换坐标而直接使用世界测地坐标系时,需要把当前电子地图的坐标体系转换为世界坐标体系
28. 世界测地坐标系(WGS84与ITRF)
近来,随着GPS定位技术的发展,全球范围内使用统一经度、纬度已成为可能。所以在全球范围内正在积极提倡使用统一的测地体系,可以预计,ITRF坐标系与WGS坐标系等世界测地坐标系的应用将更具体化。
(1) 世界测地坐标系的基准条件
① 称之为 TRF(Terrestrial Reference Frames),规定地球自转轴的基准体系
② 具有随着时间实时变化的地球自转轴、对原初子午线具有均匀的密度与一定的旋转率、对于时间持有固定自转轴的基准体系。
③ 坐标系的原点:地球质量的中心
④ Z轴(坐标轴的短轴):与地球自转轴一致
⑤ X轴:格林威治子午面与赤道面的交叉线
⑥ Y轴:赤道面上与X轴呈直角的轴
(2) WGS84
① 由美国建立的世界测地坐标系的一种
② WGS60
? 综合卫星资料、表面重力资料及天文测量资料,采纳了称之为WGS60的地心坐标
③ WGS66
? 续 WGS60以后,于1996年发表了WGS66。WGS66通过采用三角网、三边网、多普勒及光学卫星资料,得到很大改善。
④ WGS72
? 发表的资料在WGS66 坐标基础上, 添加了高精密Traverse与天文测量资料。
⑤ WGS84
? 当前使用的坐标系
? Z轴与1984年国际时间局采纳的地球自转轴平行
? X轴是与BIH固定的本初子午线平行的平面与地球面交叉的线
? Y轴的定义是与X轴与Z轴形成的平面向东方向垂直的方向
(3) ITRF
① 国际机构(IERS : International Earth Rotation Service : 国际地球旋转观测机构)建立的世界测地体系。
② 通过综合世界各国的VLBI(超常基线干绕体系: Very Long Baseline Interferometry)与SLR(Satellite Laser Ranging)及GPS观测网等观测资料,解算出结果。并根据此结果设置坐标体系。
③ 坐标系与WGS84相似,与WGS84的差只有几cm。而且针对地壳变动、
潮汐变化等地球的瞬间变化,进行了纠正与完善。所以比WGS84更准确,被各国广泛采纳。
④ 从1999年以来,使用ITRF97,而近来逐渐使用ITRF2000。
8. DGPS(Differential GPS)
DGPS(Differential GPS)就是差分GPS定位法,其原理是:应用已知参考点的坐标,最大程度减少误差。通过在参考点安装GPS接收机,观测卫星并求得各卫星的伪距纠正值,再利用此值改善移动站用GPS接收器的定位误差。
(1) GPS原理
① 基站GPS(Reference station)
通过安装在基站的GPS计算出基于卫星测量的位置数据与基站位置数据之差,再把生成的位置纠正数据发送到移动站GPS。
② 移动站GPS(Mobile station)
综合基于卫星测量的位置数据与基站发送的位置纠正数据后,确定准确的位置。
(2) DGPS特点
① DGPS与目前光学设备相比,所受的视通与距离限制较少。
② 不受气象条件及夜间观测的影响
③ 可以1个人进行测量
④ 无需记录手册,仅通过计算机就可以自动处理。
(3) DGPS种类
① DGPS
? 仅仅通过处理卫星信号中的C/A码,定位准确度就可以达到1m左右
? 通常如果能接收4个以上的卫星信号就可以测量。但从code处理方式上看:计算速度虽然较快,但准确度却降低了。
? 一般适用于允许存在一定误差范围的海洋上的位置测量或汽车导航等领域。
② RTK(Realtime Kinematic)
? 通过处理卫星信号中的L1、L2的载波,定位准确度可达到1~2cm左右
?一般需要接收5个以上的卫星信号才能测量,采用载波处理方式。虽然计算过程比较复杂,但准确度非常高。
?一般适用于需要准确度较高的陆地测量、海上测量及移动位置测量。
(4) DGPS定位方式
① 实时定位
?通过有线与无线,把基站GPS生成的位置纠正数据传送至移动站GPS,实时解算出正确位置。
?位置纠正数据的通信方式
- 无线通信:使用UHF, VHF, HF, MF等无线通信,主要应用于一般测量
- 有线通信:使用基于光纤线缆的通信,主要应用于测量领域
② 后处理定位
? 基站及移动站GPS各自获得卫星数据后,通过应用软件解算位置
? 因为实时定位方法或Kinematic定位方法的存在,目前已经很少使用它了
(5) DGPS定位存在的问题及对策
① 位置纠正数据通信存在的问题
? 问题
DGPS测量的成败受通信设备的性能影响,较难实现长距离测量
? 对策
- 在通信设备性能范围内设置多个基站;
- 向目前运营中的GPS观测站提供位置更正数据传送服务(LADGPS或WADGPS系统组建)
② 坐标转换体系存在的问题
? 问题
在 WGS84坐标系转换为TM坐标系时,用户随意使用各自的转换系数
? 对策
规定并发布国家级分地区坐标转换系数,以获得统一准确度的测量结果
9. IDGPS(Inverse DGPS 或 Inverted DGPS)
DGPS是用于确定移动站GPS位置并以用户为主的定位方法。与此相反,IDGPS是用于确定移动站GPS位置直至测定位置变化量,是一个以管理员为主的定位方法。与DGPS从基站向移动站GPS传送纠正信号方式相反的是,IDGPS是通过从移动站GPS向基准站GPS传送观测数据,测得准确的移动站GPS位置的逆DGPS方式。
(1) IDGPS原理
(2) DGPS与IDGPS的比较
DGPS
Inverted DGPS
通信方向
基站至用户
用户至基站
纠正方
用户
控制站
纠正领域
伪距领域
伪距或导航领域
服务对象
多数
特定少数
误差范围
m~cm
m~cm
应用领域
CNS、海洋测量、土木工程测量等
车辆关系、移位测量
(3) 特点
① 在DGPS定位方式中,各移动站只接收基站GPS的位置纠正信息,所以通信方式比较简单。但在IDGPS方式中,基站GPS需要同时接收多个移动站传送的位置数据,所以对通信设施的要求比较高。
② 需要实时的并同时对多个移动站GPS数据进行位置纠正的软件。
③ 应用于车辆关系、ITS及建筑物位置移位测量等。
10. SA/AS(Selective Availability/Anti-Spoofing)
美国国防部出于政策等原因,采取了人为降低GPS测量准确度的措施。也就是赋予卫星时钟信息及轨道信息等随机误差,或随机改变发送方式与信号形态,这种人为降低GPS准确度的方式称之为SA。出于军事目的,把P码进行加密,称之为AS。
(1) SA(Selective availability)
① 通过调节星历表资料与卫星时钟资料使卫星与接收机之间产生误差
② SA工作状态下的误差约为100m左右
③ 通过相对位置解算或DGPS,降低由SA造成的误差
(2) 解除SA
自从2000年5月1日,解除了对GPS误差具有最大影响的SA。所以,目前可以在任何时间、地点都能够获得精确度为5~15m范围内的位置信息。此项措施令航空、交通、物流、船舶等多种民间应用领域受益非浅。但是即使解除了SA,但以米单位为精确度的汽车导航及GIS领域仍需要目前的DGPS技术。
(3) AS(Anti Spoofing)
① 为了防止敌人的干扰,这是把用于军事目的Pcode进行密码化的方法
② 只有具备解密功能的接收机才能接收信号
11. GPS的 Cycle Slip
Cycle Slip是GPS载波相位追踪环路(Phase lock loop:PLL)上瞬间丢失载波相位差值而产生的误差,Sycle Slipe对使用载波相位数据的精密位置测量领域会造成重大影响,所以检验Cycle Slip非常重要。
(1) 产生Cycle Slip的原因
① GPS天线或周围的地形、建筑物等引起的信号中断
② 高信号噪声
③ 低信号强度(Signal strength)
④ 低卫星高度角
⑤ Cycle Slip一般多树发生在移动测量过程中
(2) 对付Cycle Slip的方法
① 根据接收线路的特性,跳跃波长整数倍的特性
② 可以在数据的开始处理阶段发现Cycle Slip,并编辑
③ 通过基线解算软件进行自动处理
12. DOP(Dilution Of Precision) 相对误差
如同后方交会法中参考点排列会影响准确度一样,GPS误差也受接收机与卫星的几何排列影响。此时,作为定位准确度影响的系数,使用DOP(精密度低下率)。
(1) DOP种类
① GDOP : 几何(三维座标与时间)精密度
GDOP²=PDOP ²+TDOP ²
② PDOP : 位置精密度(三维位置):3~5程度适当
PDOP ²=HDOP ²+VDOP ²
③ HDOP : 水平精密度(水平位置): 2.5以下适当
HTDOP ² =HDOP ²+TDOP ²
④ VDOP : 垂直精密度(高度)
⑤ RDOP : 相对精密度
⑥ TDOP : 时间精密度
(2) DOP的特点
① 数值越小表明精度确越高
② 把地表面上最佳排列状态作为“1”
③ 到“5”虽然 在使用上没有问题,但超过“10”时,受影响较大
④ 接收机处于中间,四个卫星呈正四方形,即体积最大时,GDOP、PDOP等最小
(3) 可视性(Visibility)
即便是良好的GDOP,也可能由于山、建筑物等遮挡,不能确保卫星传播路径的可视性(Bad visibility)。这种与卫星的视通有关的问题称之为可视性。
13. RINEX
RINEX是Receiver Independent Exchange Format的缩写,是GPS数据格式的国际标准。通过采用这种统一的国际标准,在静态定位中使用多种GPS接收机观测时,即使使用任何一种后处理软件,也可以使收集到的GPS数据基线解算变得容易。
(1) 通过不同GPS接收机观测时的注意事项
① 允许共同使用不同生产时间、不同种类的GPS接收机
② 需要统一的卫星信号接收性能(混合使用2个波形及1个波形接收机时,参考1个波形性能的结果)
⑦ 如果GPS天线高度不同结果就不一样,所以观测时必须正确输入天线接收卫星信号的中心点高度
(2) RINEX格式的组成
① 数据格式: ASCII(American Standard Code for Information Interchange)形式
?ASCII :为了处理资料及计算机相关的设备之间的通信,指定了国际标准码。ASCII字节由7bit字节与用于检验奇偶的1bit字节构成。
② 文件组成
?观测文件 : 包括Pseudo range 及 Carrier phase
?轨道星历文件:卫星轨道信息等
?气象文件:气象信息等
(3) 后处理软件与RINEX格式
① 用于静态定位计算的后处理软件,随着不同GPS接收机及生产商,其形式及运用方法都有所不同。
②一旦生产商的GPS数据形式已经处理好,就非常容易转换为RINE形式。
14. 应用于测量的卫星系统
用于测量的卫星大致可分为测地卫星与地球观测卫星,测地卫星有GPS或GLONASS,主要应用于测量;而地球观测卫星有LANDSAT或SPOT,主要应用于获得基于远程探测的卫星图片。
测地卫星有:GPS(美国)、GLONASS(俄罗斯)及计划发射的GALILEAO(欧盟联合)等轨道卫星与分布各大陆的固定的WAAS(美洲大陆)、EGNOS(欧洲大陆)、及计划发射的MSAS(亚洲大陆)等同步卫星。也把这些卫星统称为GNSS(Global Navigation Satellite System)。
① 轨道卫星
?种类 : GPS, GLONASS(Global Navigation Satellote System)及计划发射的GALILEO 卫星
?GPS, GLONASS :用于军事目的的测地卫星,根据美国国防部的政策,有可能随时人为降低准确度,或中断使用
?GALILEO :以民间为主导的导航系统,针对GPS或GLONASS,专用于民用卫星导航系统
② 同步卫星(区域性卫星:Geostationary Satellite)
?种类
- WAAS(Wide Area Augmentation System : 美洲大陆)
- EGNOS(European Geostationary Navigation Overlay System : 欧洲大陆)
- MSAS(MTSAT Satellite Augmentation System : 亚洲大陆)
?目前WASS与EGNOS已经投入使用,MSAS由日本计划发射
?GPS及GLONASS相结合使用,通过向地面传送位置信息数据,实现广域DGPS服务功能,所以仅一台接收器也可以获得1~3m以内的准确位置的定位。
?今后将广泛应用于CNS(Car Navigation System), ITS(Intelligent Transportation System), LBS(Location Based Service)领域,所以有望获得飞速发展。
15. GALILEO卫星系统
GALILEO是欧盟计划并实施的卫星导航系统,与GPS或GLONASS不同,是专门应用于民用的系统,它也是GNSS项目的一部分,计划于2008年正式投入使用。
(1) GNSS项目
GNSS项目分为2个阶段,GNSS-1GPS及GLONASS相关的区域性卫星运营阶段,GNSS-2是GPS与GLONASS独立卫星运营阶段。
类别
卫星名称
运营目的
运营地区
GNSS-1
WAAS,EGNOS,MSAS
结合当前的GPS,GLONASS,提供广域DGPS功能服务,定位准确度非常高(1~3m)
WASS(美洲大陆):运营中
EGNIS(欧洲大陆):运营中
MSAS(亚洲大陆):推进中
GNSS-2
GALILEO
运营与GPS及GLONASS相同的独立的民用卫星导航系统
全球范围内(2008年)
(2) GALILEO 卫星
① 特点
? 计划使用3个频率的载波
? 有望获得比GPS或GLONASS更高的独立定位准确度(2drms至4m以下)
? 载波定位Ambiguity瞬间确定的可能
② 卫星轨道
? 卫星高度:以地面为起点高度为23.61km
? 公转周期:14小时21分6秒
? 卫星数量:30个中轨道卫星
? 轨道平面:3个轨道排列10个卫星
? 轨道平面角度:54?
? 时间测量:UTC
③ 提供服务
? 免费信号使用服务:OSA(开放服务)
? 收费信号使用服务:CAS(管制服务)
- CAS 1 : 商业性服务
- CAS 2 - SAS : 高精密服务
CAS2 - GAS : 用于非民用领域的政府服务(使用密码的信号)
全面了解GPS全球定位系统(3)
16. GPS与GLONASS比较
GLONASS是与美国GPS具有相同概念的测地卫星系统,可以应用于定位。但由于俄罗斯财政出现困难,所以减少了卫星数量,目前只有6~7个卫星在工作。所以GLONASS很难独自工作,但是结合GPS,可以大大改善DOP。
参数
GLONASS
NAVSTAR GPS
运营体系的全部卫星数量
21+3(预备)
2000年 当前6个
24+3(预备)
2000年 当前27个
轨道平面数量
3
6
轨道倾斜度
64.8°
55°
卫星轨道的高度
19,100 km
20,180 km
轨道周期
11小时15分
12小时
地面反复轨道
每恒星日
每8恒星日
卫星(位置推算)的资料传送
9个参数
EC(earth-centered)
EF(earth-fixed)
Certesian坐标系上的位置、速度、加速度
Keplerian参数
Interpolation系数
测地坐标系
SGS85
WGS84
时间基准
GLONASS体系时间
GPS体系时间
体系的时间纠正
UTC(SU)
UTC(USNO)
传送时间
2.5分钟
12.5分钟
卫星信号领域
频率领域
code领域
L1波段频率
1.602~1.615MHz
1.575MHz
L2波段频率
1.246~1.256MHz
1.227MHz
code
所有卫星都统一用C/A-code on L1
P-code on L1, L2
各个卫星不同 C/A-code on L1
P-code on L1,L2
code形态
PRN sequence
Gold code
code频率
C/A-code 0.511MHz
P-code 5.11MHz
C/A-code 1.023MHz
P-code 10.23MHz
时间资料
Clock offset
Frequency offset
Clock offset frequency
Offset and rate
17. GPS的历史与未来
除了俄罗斯GLONASS,GPS一直主导着卫星定位系统(SBPS: Satellite-based Positioning System)市场。但是随着欧盟实施伽利略卫星计划,形成了新的竞争体系,所以民用GPS服务有望迅速提高。
(1) GPS 卫星现状
① 1978年 2月 : 发射Block I 卫星(截止85年发射11个)
② 1989年 2月 : 发射 Block II 卫星(截止90年发射9个)
③ 1990年 11月 : 发射Block IIA 卫星(截止97年发射19个)
④ 1997年 7月 : 发射Block IIR 卫星(目前为止发射6个)
⑤ 2002年 现在 : 29个卫星运行中
(2) GPS 测量的历史
① 1983年 9月 : 宣布民间无偿使用GPS 信号
② 1990年 3月 : SA 启动
③ 1993年 12月 : 24个GPS卫星及实现正常工作
④ 1994年 10月 : 协商今后10年无偿提供GPS服务
⑤ 1995年 4月 : 开始正常工作(24个卫星群正常运行)
⑥ 2000年 5月 : 停止SA工作
(3) GPS未来发展
① 当前L2信号的更新
?如同L1、L2也调制新的民用信号(C/A码),通过2个频率纠正,可以提高定位准确度。
?通过当前的C/A码与P码,以及精密导航软件,提高定位准确度。
?通过支援独立的军用信号(M码),强化安全及提高定位准确度。
② 提供新的L5波频
?在L1及L2波后,提供第三个民用信号L5
?继当前Block IIR卫星群之后,通过Block IIF(Follow)卫星6,提供L5传输服务。
?提供P code水平定位准确度。
?通过实时提供跟踪RTK定位载波信号解决Ambiguity。
?2005年开始实施。
③ 为了在欧盟GALILEO卫星与俄罗斯GLONASS-M卫星系统的竞争中,令GPS持续占据优势并在卫星定位市场不断创造附加价值,预计GPS将提供更好的信号服务。
18. WADGPS
通过VHF或MF传送地面基站生成的位置纠正信号,实现中长距离DGPS功能。而WADGPS(Wide Area DGPS)不在地面设有基站,而是利用通信卫星,通过多个基站网络才发送生成的位置纠正信号。通过这种方式,至少在一个国家内的任何地方,仅用一个GPS接收机,定位准确度就可以达到1m以内。
(1) WADGPS运营体系
(2) 位置纠正数据的形成及发送
① 位置纠正数据的形成
?决定GPS轨道:将伪距及载波测量值处理为Kalman filter后计算。
?电离层延迟纠正:广泛应用Global lonosphere Map S/W。
?大气层延迟纠正
② 位置纠正数据的发送
?以(message)发送加密信号
?通过专用接收机,转换为RTCM标准格式,可以实时实现DGPS
?与应用L1波C/A码的接收机互换
(3) 根据定位范围的DGPS种类
① 个人用DGPS:主要通过UHF无线调制解调器发送位置纠正信号。基站与移动站之间可以定位的距离通常是30Km(近距离)
② LADGPS:主要使用MF(中波)无线调制解调器发送位置纠正信号,基站与移动站之间可以定位的距离为约100km ~ 150km(中距离)左右。
③ WADGPS:因为是利用通信卫星发送位置信号,所以无需组建地面基站。至少在一个国家范围内定位距离是不受限制的(远距离)
19. 韩国公共卫星导航服务介绍(LADGPS)
在韩国,运用最有效的卫星导航服务是基于海洋水产部Beacon DGPS基站的位置纠正服务系统,其内容如下。
(1) Beacon DGPS
① Beacon指的是为船舶或飞机指引路线而设置的固定的符号、标识、光源或与此相关的建筑物。
②Beacon DGPS是通过接收海洋水产部的DGPS基准站(Beacon 基站)发送的位置纠正信号(Beacon信号),仅用一台GPS接收器也可以获得准确度为1~3m的位置信息的实时DGSP定位方法。
(2) 韩国Beacon基站设置现状
① 全国设有11个基站
② 定位范围:以基站为中心,半径在100km~180km之间
③ 定位准确度:约1~3m
(3) 位置纠正数据
① 位置信号纠正的方式采用国际标准形式RTCM(Radio Technical Commission for Maritime Service)SC-104。
② 应用于广播的电波是中波(FM),频率为280KHz~319KHz,24小时广播。
(4) 优缺点
① 基于LADGPS(Local Area DGPA)并可在全国的海上及海岸内实现DGPS定位。
② 基站在约100km范围以内的陆地上,若接收信号良好就可以定位。
③ 使用频率为中波,深受工业噪声(Industrial Noise)影响,所以地区位置纠正信号的接收效果不太好时,使用受限。
20. GPS参考网/GPS观测站
目前GPS参考网(Reference Network)由全球范围内正运营的400个左右的GPS参考点组成,正在计划增设1400个左右的GPS参考站。
GPS参考网广泛应用于导航、测地测量、地形空间信息体系(Geo-Spatial Infomation System:GSIS)等多种领域,所以其应用将急速扩大。从全球范围来看,虽然当前广域参考网的参考点数量只有75个,但未来将扩大到125个。另外,世界各国也在自己的领土建设一定密度GPS观测站,所以可以在全国任何地方不受时间、距离、场所、气象等条件限制,及时地提供正确的位置信息。
(1) 韩国国内GPS观测站建设现状
① 国家地理院、行政自治部、海洋水产部及科学技术部等国家机关建设60个以上的观测站并正常运营中。
② 其它政府投资机关建设独自的GPS参考网并正在运营。
(2) GPS观测系统的组成
① 无人远程观测站
? GPS接收机及天线
? 天线安装塔
? 通信设施
? 电力供应设备
② GPS观测中心
? GPS观测网的控制及管理系统
? 数据的接收、存储、处理及分析系统
(3) 观测网系统的效果
? 提供GPS卫星轨道信息
? 测量时起电子参考点的作用
? 起到车辆导航系统及智能型交通管制系统的基站作用
? 通过测量观测站的位置变动了解地壳变动。还可及时监测地震状况,起到灾难防止系统的作用
21. Airborne GPS
Airborne GPS通过安装在飞机上的GPS接收机实时提供位置信息,这种应用将不断扩大。Airborne GPS根据应用区分为:测量(Surveying)及地图制作(Mapping)及传输(Transportation)。
(1) 测量及地图制作
在测量及地图制作方面,Airborne GPS主要提供传感器的导航与位置资料。
① 航空摄影测量
通过在航空摄影测量仪上安装GPS接收机拍摄照片的同时,直接获得拍摄地点的位置信息(摄影的外部标定要素),这样可以减少航空三角测量所必要的地面基点的数量,也减少了制作地形图所消耗的时间和经费。
② Laser截面测量
? Laser截面测量需要在飞机上安装激光脉冲、GPS接收器及惯性测量设备
? 平面位置确定是依据DGPS确定;垂直距离则通过惯性测量设备确定
? 通过GPS若能确保0.5~1m垂直准确度与数米范围内内的水平准确度,即可制作数字地图
③ 重力及重心倾斜测量
GPS测量可以满足重力及重心倾斜测量所需的位置准确度,在纠正相对速度对重力影响时提供必要的传感器速度资料。
④ Laser的垂心测量、利用雷达影像的3维定位
(2) 运输领域
GPS除在飞机独立飞行中发挥重要作用外,还有其它应用领域。如用飞机洒农药、播种子时,为飞机提供导航。
① 为飞机导航或引导飞机起飞与着陆
② 在山林地区飞机洒农药、播种种子等
22. GPS-VAN
近来,道路设施的计划、管理及维护等持久道路信息实现了资料数据库化(DB)。因此对高效的3维自动化的道路信息管理体系的需求剧增。GPS-VAN正是顺应这样的趋势,通过在车辆上安装GPS接收器、惯性导航体系、CCD照相机及各种探测装置,使高速行使的车辆自动获得与道路相关的各种建筑物的现状与属性信息,这就是可移动式道路系统。
(1) GPS-VAN的设备构成与原理
GPS-VAN由GPS接收机、数码相机、惯性导航设备、轮胎检测器、微动气压仪(statoscope)等组成。
① GPS 接收机
为确定车辆位置一般在车辆上安装GPS接收机。而为了更好地应用DGPS,要有地面GPS参考站。
② 两台数码摄像机
通过摄像机获得立体影像,在计算机上使用数码摄影测量的image registration,实时获得对象的3维位置信息(道路的几何信息)与属性信息。
③ 惯性导航设备、微动气压仪(statoscope)、轮胎检测仪
克服卫星信号盲区存在的问题,决定方向角度。
(2) GPS-VAN的资料获得与处理
① 决定车辆位置
a. GPS技术
?RTK(cm级准确度)
- 确定基于OTF(On-The-Fly)的不确定常数
- 在数分钟的时间内连续观测5个以上卫星
?DGPS(m级准确度)
- 不需要连续接收信号,只在每个观测时间内接收最少4个以上的卫星信号
- 准确度低
b. 解决信号盲区的问题
利用惯性测量仪、轮胎探测仪和微动气压仪
c. 处理获得的资料
通过基于Kalman filter原理的最小平方法处理。
② 立体影像处理
把两台数码摄像机获得的影像,通过数字摄影测量的图像配准(Image registration)处理法处理,实时获得对象的3维位置信息。
(3) GPS-VAN System特点
① 与光波测量相比作业时间更短,只有1名作业人员也可以测量。
② 安装了GPS接收器的车辆可以移动,可任意选定现场内的观测点。
③ 计算机可及时处理获得的资料,资料保存非常方便。
④ 车辆行使过程中,由于天线可以自动保持水平,所以在凹凸不平的地区也可以获得高准确度的资料。
(4) GPS-VAN中的应用
① 建设道路信息体系
② 设施维护管理
③ 施工等各种测量
④ 自动制作地图及获得GSIS资料
⑤ 实现智能交通运输体系(ITS)
全面了解GPS全球定位系统(4)
23. GPS摄影测量学
在目前摄影测量方法基础上,融合了GPS测量技术的新学科。广泛应用于制作地形图的GPS航空摄影测量与GPS-VAN上的地面摄影测量等。
(1) GPS航空摄影测量(Aire borne GPS)
① 基本原理
在航空摄影测量仪上安装GPS接收机,拍摄照片的同时,直接获得摄影机的位置信息。
② 优点
? 通过保持准确的飞行路线实现精密摄影,便利的实现计划。
? 飞行器上的GPS接收机可以准确定位突出位置,所以可以减少航空三角测量所必需的地面参考点数量,相对减少制作地形图所需的时间与经费。
(2) GPS-VAN
① 意义
通过在车辆上安装GPS接收器、数码照相机、惯性导航设备、探测器、微动气压仪等,令行使中的车辆实时自动获取道路信息,这样的系统就叫移动式道路信息系统。
② 特点
?融合了GPS测量技术、车辆导航、数码影像处理技术等最新测量技术。
?提高了获得道路相关GSIS资料的效率。
(3) 引入惯性导航体系(INS)
① GPS摄影测量为了弥补GPS缺点,采用了与INS相结合的方式。
② INS在确定旋转角等方面更加出色。
③ GPS/INS测量体系有望获得普及。
24. CNS(Car Navigation System)
自从GPS应用到测量领域以来,广泛应用于测量为主的多个领域。其中最为显著的是车辆导航系统(CNS)。车辆导航系统通过在车辆上安装GPS,获得GPS位置、时间信息,为行使的车辆提供位置、行进方向、目的地查询、车辆最佳路线及各种便利信息,营造舒适的驾驶环境。
1)CNS的特点
当前CNS使用GPS、DR(推算方法、Dead-Reckoning),还有MM(Map-Matching)等混合计算方法,并传输彩色的CD-ROM存储的数字地图画面,特点如下。
①GPS测量时,获得的资料有GPS接收机的位置(X、Y、Z)及时间信息、卫星轨道信息、接收状态(DOP)等。
② 为行使的车辆做动态测量时,可忽视位置误差的影响,故应用GPS测量方法。
③ 通过从GPS获得的位置信息与时间信息分析车辆的速度,可以间接地分析出道路状态,所以也可以应用于调查交通量。
④ 利用位置信息确定车辆位置;通过存储测量位置信息分析车辆行使路径。
2)CNS系统
25. ITS(Intelligent Transport System)
为了提高交通系统的效率与安全,下一代交通系统将融合GPS、电子、计算机、信息、通信、控制等智能技术,并应用交通管理、信息提供、大众交通、货物车辆的运营与车辆生产等涉及整个交通领域的新技术。可以说,下一代交通系统将是整个交通系统的新型产业,充分体现出21世纪信息化的迅速、安全与快捷模式。
ITS的目标如下:
ITS的目标就是极大地扩大当前交通设施的容量,并通过完善安全系统,不断减少交通事故。
① 通过提高交通系统的运营效率及增加容量,缓解当前交通繁忙现状。
② 通过改善交通服务,提高驾驶员的移动性、便利性及安全性。
③ 提高交通系统的安全性。
④ 强化国家产业竞争力。
⑤ 通过提高能源效率,以及减少大气污染,减少环境治理费用。
⑥ 发展汽车及ITS相关产业。
26. VRS
VRS(Virtual Reference Station)方式是采用‘虚拟参考点方式’的新的实时GPS测量法。此方式无需另建参考站GPS,仅通过移动站GPS,把VRS服务中心提供的位置纠正数据发送至移动电话,便可实现RTK或DGPS测量。
(1) VRS方式原理
①VRS服务中心24小时接收GPS观测数据,并接收安装在模拟参考点的移动站接收的GPS观测数据。
②利用观测站与模拟参考点的观测数据,通过静态定位方式瞬间处理,生成模拟参考点的位置纠正数据,并通过移动电话或无线互联网调制解调器发送给移动站GPS用户。
(2) VRS 的定位条件
① 应具备完善的国家级测地参考点体系。
② 观测站应至少以30~50km间距均匀排布。
③ 应不断提高瞬间生成位置纠正数据的GPS基线解算及调整技术。
④ 提供的位置纠正数据应具有测地结果的权威性。
⑤ 应确保作为位置纠正数据的通信媒体的移动电话或互联网调制解调器等通信质量。
⑤ 移动站GPS用户需要掌握GPS测量基础知识
(3) VRS定位的优点
① 可以解决RTK或DGPS定位存在的许多问题。
?无需另建参考点GPS
?无需接收、发送位置纠正数据所需的无线调制解调器设备
?因使用移动电话,所以不受通信距离的制约
?无需实时测量所需设备的初始化状态
② 提供多种GPS定位服务
?精密定位:cm级的RTK-VRS服务;
?一般定位:Sub meter 级DGPS-VRS;
?静态定位:后处理方式的静态测量VRS服务
③ 通过静态VRS方式时,在参考点无需另外安装GPS接收机,而是把观测站间的基线直接应用于session观测。所以可以用较少的GPS设备观测到更多的结果。
(4) VRS定位的缺点
① 在基于GPS观测网的VRS网以外的地区就不能定位;
② 定位范围为移动电话可接听范围;
③ 存在移动电话收费的问题;
④ 需要构筑整体VRS系统所需的巨大的建设费用,包括:建设观测站、组建VRS服务中心、扩充移动电话基站网及提高通话质量等;
⑤ 这些工作的前提是要对地理、经济等因素作出可行性评价
27. LBS
移动位置服务(LBS—Location Based Service)是利用一定的技术手段,通过移动通信网不仅可获得终端用户的准确位置(经纬度坐标),还可在电子地图平台的支持下为用户提供相应的增值服务。它可以实现紧急救助、个人位置信息服务与ITS相关服务等功能。这些应用当中,基于电子地图获得位置信息与跟踪是最重要的应用领域。
(1) LBS的功能及期待效果
① 紧急救助援助服务
?救灾时提供位置信息;
?车辆事故、防盗、应急救助、预防犯罪等领域;
?通过连接119、110,实现自动控制功能
② 位置信息服务
为营业、观光、物流、配送、安全等多种产业领域提供用户当前位置与各种相关服务
③ 交通信息服务
?提供实时交通信息及汽车导航功能;
?提供最短路径及最佳路径;
?可实现物流管理
(2) LBS的运营体系
LBS由移动通信基站网、个人移动终端机与LBS运营中心的无线通信体系组成。
(3) LBS的定位方法
① 利用当前移动通信用基站网络
?AOA(Angle of arrival)方式
由两个以上基站测量接收终端机信号的方向并算出方位角,再确定终端机位置。
?TOA 方式(Time of Arrival)
从3个以上的基站测量终端机信号到达的时间,再得出距离确定终端机位置。
② 利用GPS的方法
? 在终端机上安装GPS,直接确定位置
? 通过基站将测定的位置信息直接传送到运营中心
(4) 为组建LBS系统的测量条件
① 应用当前移动通信基站网
? 对各个基站根据国家级三角点测量方法进行绝对坐标测量
? 确保基站相互间的视准线
? 城市建筑物会产生反射信号,这种信号令终端机产生误差,所以需要开发解决此类问题的技术
② 利用GPS
? 个人便携式终端机上需要安装GPS
? 需要传送GPS确定的用户位置信息与LBS运营中心处理的服务数据向移动用户双方向通信
③ 发展应用于上述用途的多种图层电子地图
? 发展可以标识用户位置、跟踪的电子地图
? 发展符合用户要求的多种不同图层的电子地图
? 使用当前坐标系时,需要建立可以迅速提供服务的实时坐标转换系统
? 不转换坐标而直接使用世界测地坐标系时,需要把当前电子地图的坐标体系转换为世界坐标体系
28. 世界测地坐标系(WGS84与ITRF)
近来,随着GPS定位技术的发展,全球范围内使用统一经度、纬度已成为可能。所以在全球范围内正在积极提倡使用统一的测地体系,可以预计,ITRF坐标系与WGS坐标系等世界测地坐标系的应用将更具体化。
(1) 世界测地坐标系的基准条件
① 称之为 TRF(Terrestrial Reference Frames),规定地球自转轴的基准体系
② 具有随着时间实时变化的地球自转轴、对原初子午线具有均匀的密度与一定的旋转率、对于时间持有固定自转轴的基准体系。
③ 坐标系的原点:地球质量的中心
④ Z轴(坐标轴的短轴):与地球自转轴一致
⑤ X轴:格林威治子午面与赤道面的交叉线
⑥ Y轴:赤道面上与X轴呈直角的轴
(2) WGS84
① 由美国建立的世界测地坐标系的一种
② WGS60
? 综合卫星资料、表面重力资料及天文测量资料,采纳了称之为WGS60的地心坐标
③ WGS66
? 续 WGS60以后,于1996年发表了WGS66。WGS66通过采用三角网、三边网、多普勒及光学卫星资料,得到很大改善。
④ WGS72
? 发表的资料在WGS66 坐标基础上, 添加了高精密Traverse与天文测量资料。
⑤ WGS84
? 当前使用的坐标系
? Z轴与1984年国际时间局采纳的地球自转轴平行
? X轴是与BIH固定的本初子午线平行的平面与地球面交叉的线
? Y轴的定义是与X轴与Z轴形成的平面向东方向垂直的方向
(3) ITRF
① 国际机构(IERS : International Earth Rotation Service : 国际地球旋转观测机构)建立的世界测地体系。
② 通过综合世界各国的VLBI(超常基线干绕体系: Very Long Baseline Interferometry)与SLR(Satellite Laser Ranging)及GPS观测网等观测资料,解算出结果。并根据此结果设置坐标体系。
③ 坐标系与WGS84相似,与WGS84的差只有几cm。而且针对地壳变动、
潮汐变化等地球的瞬间变化,进行了纠正与完善。所以比WGS84更准确,被各国广泛采纳。
④ 从1999年以来,使用ITRF97,而近来逐渐使用ITRF2000。
全面了解GPS全球定位系统
全面了解GPS全球定位系统+++
GPS(全球定位系统)详解
GPS(全球定位系统)详解
GPS(全球定位系统)详解+++
GPS(全球定位系统)详解++
全球定位系统(GPS)技术专利扫描
汽车GPS全球定位系统 | 专家评论|CHE168
全球定位系统
户外探险装备GPS全球定位系统 生活.旅行必备之装备
利用A-GPS提高全球定位系统应用的性能
全面了解RSS
全面了解e
全面了解数码相机 名词解释
全面了解人体
【健康】全面了解人体
全面了解人体1
全面了解人体
全面了解人体
全面了解肾虚
全面了解五险一金
全面了解数码相机 名词解释
全面了解数码相机 名词解释
GPS软件全面解析 - GPS软件讨论区 - GPS交流论坛 中国最大的GPS论坛,导航地...